0. 前言
本篇 Blog 主要对强化学习的几个参数更新方法进行学习.
阅读前, 需要你 : 有高数基础知识, 线代基础知识, 统计学习基础知识, 当然还要有 ML 和 DL 的知识背景.
1. 总览和相关概念
1.1 总览
 source from David Silver’s RL Course
source from David Silver’s RL Course
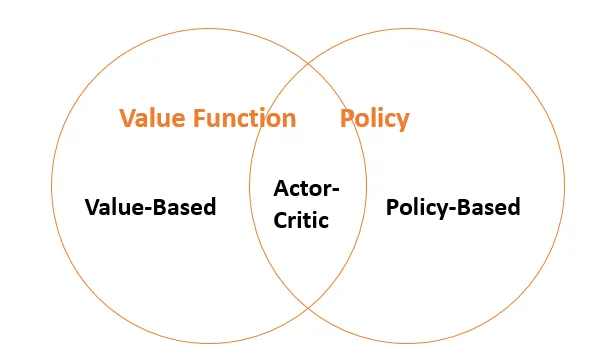
目前, 强化学习的方法基本上划分为 2 大类: policy based and value based.
-
policy based 主要是通过学习一个 Actor, 在面对 state 的时候输出预估最优的 action.
-
value based 则是想通过学习一个 critic, 来评估当前这个 state 下, 哪个 action 能够得到的分数最高, 进而实现选择 action.
当然这么说好像看起来没有什么区别, 后续我们会深入分析他们的区别和联系. 最后还有把 policy based and value based 结合起来的, 就是既有 Actor 也有 Critic.
1.2 概念
- observation
比如你打游戏, 这一帧画面就是一个 observation, 有时候也称为一个 state, 就是包含了当前系统的状态和所有信息.
- action
就是面对当前画面, 采取的措施, 看到敌人你是躲还是开枪?
- reward
基于当前 observation, 你采取了行动 action, 将得到奖励, 比如开枪干掉了对面, 得到 100 分.
- episode
这里拿飞机大战举例子, 从你进入游戏, 左右闪躲腾挪, 开枪击毁对面飞机,直到游戏结束, 这就叫一个 episode.
- trajectory
还是飞机大战, 从你进入游戏, 左右闪躲腾挪, 开枪击毁对面飞机, 直到游戏结束(假设 T 时间步), 在你这一个 episode 中, 你看到的所有画面帧, 所有的行动, 所有的奖励, 这样一个序列称为一个 trajectory:
2. Policy Based
2.1 要做什么
前边提到 Policy Based 要训练一个 Actor. Actor 理解为就是一个 , 给定当前的 observation , Actor 评估当前某个 action 的概率 : .
那怎么训练呢? 假设已经有一个 trajectory , 这样的序列除了第一个 state 是初始化, 后续你遇到的每一个 state 都是 Actor 选择的 action 导致的, 因此只需要收集这样一批 trajectory, 每个 trajectory 我们都能收集到相应的奖励 , 我们希望这个 Actor 能够在平均的,期望上的奖励能够最大:
2.2 理论怎么做
2.2.1 计算
2.2.1 计算梯度
通常我们利用梯度方向更新参数, 所以需要计算 关于 的梯度:
这里, 对于任意 :
上式中, 与 Actor 无关, ,也与 Actor 无关, 因此:
于是:
写成期望的版本:
使用梯度提升更新 Actor 的参数:
2.2.2 改进奖励计算方式
上边在建模 reward 的时候, 任何 action 的奖励都是正的, 这明显不合理, 因此可以加一个 baseline :
一般的, baseline b 可以取值为截至目前的平均 reward: .
此外, 上边式子可以理解为是对 的一个 sum weight. 其中 表示的是, 在 state 时采取 action 时对后来获得的总奖励的影响是多大.
另外还可以从减少 variance 的角度来理解, 可移步至此(点击跳转)
在上边的公式中, 这个 weight 对每个时间步 t 都一样, 均为 . 直觉上, 当前时间步 t 采取的动作, 只能影响 时间步 t 之后的奖励或者状态等. 并且随着时间流逝, 时间步 t 采取的动作对后续的影响应该越来越小, 因此对 进行修改(忽略 b ):
其中, , baseline 也同步修改. 举个例子, 假设 :
注意到, 此时 是想评估当前 actor 基于当前 state 和 action 的分数, 不妨记为 , 而 可以理解为度量面对当前 state (不与 action 有关), 这个 actor 平均能够取得的分数, 不妨记为 , 那如果把 记为 , 其实这就是 Value Based 方法 (也就是一个 critic). 二者结合, 就是 Actor - Critic, 我们后续会讨论. 此时, 之前的期望公式就可以写为:
2.3 实际怎么做
前边的更新策略有个大问题就是, 我们要收集数据, 这个需要一轮一轮的玩下去才能收集到这些信息. 而且更新的这个 Actor 和 环境进行交互的 Actor 是同一个, 这就导致收集一批数据, 更新 Actor 之后, 整个过程就得停下来, 用新的 Actor 再次和环境进行交互 (这个过程称为 Online-policy). 这样就会很慢, 我们想着能不能让当前的 Actor 借助别人的力量, 使用别人的历史数据去更新?(这个过程称为 Offline-policy)
2.3.1 Importance Sampling
首先介绍一个 trick, 假设我们要计算 , 但是 也许不好计算, 不好得到, 但是我们有一个分布 , 计算很容易, 也很容易积分:
可以看到, 本来是从 抽取数据, 现在做到从 抽取数据, 并且期望还不变. 但是需要注意的是, 他们的方差是不一样的.
首先:
而:
二者方差差一点, 因此要求 和 不要差太多.
2.3.2 off - policy
off-policy 就是利用上边的 importance sampling, 使用另外一个 policy 的 {( )} 去更新 policy . 于是,
上式 是我们进行的假设, 假设环境在第 t 步出现的状态和 Actor 无关( 看起来不太合适, 这个也是没办法的办法 ). 此外 policy 是固定的, 用来和环境交互, policy 是我们要更新的. 更新一段时间后, 我们可以执行 以防二者差距太大.
这样, 反推得到:
如果使用 Actor - Critic 的方式评估 ,之前的期望公式就可以写为:
反推得到
2.4 PPO
在上边的基础上, 我们来看经典算法 PPO. PPO 其实就是在上边的基础上, 加了一个 KL 散度(什么是 KL 散度?), 这是因为我们要尽量保证 . 这里直接贴出原始 paper 的公式, 现在一目了然:

这里 KL ( , ) 实际上就是让二者的输出, 计算一下离散的 KL 散度值作为代替. 不过作者又给了一个更加简单粗暴的实现: 如果二者差距确实大,直接 clip 一下就完事了:

这样就把 限制到了 .
3. Value Based
3.1 概念
[1] Value Based 的方法目标就是训练一个 critic, 也可以叫一个 function, 功能就是给定一个 state (或者以及一个 action), critic 能够评估当前这个 Actor(policy : ) 最后能取得多少分数(相对的,平均).
不妨记, 表示给定一个 state s, critic 给出的基于当前 state, 该 policy 能得到的分数(平均).
如果对于任意的 state s, 如果 恒成立, 则称 better than . 于是这样, 我们整个系统中, 最好的那个 记为 . 并将 对应的 V 记为 . 即
[2] 表示给定一个 state s, 然后 Actor 采取一个 action a, critic 给出的基于当前 state 和 action, 该 Actor 能最后得到的分数(平均).
同理, 在每个 state 上采取的 action a, 将 Q 值是最大记为如下形式:
对于 和 , 二者有以下关系:
当然, 对于最优的 value,那么会有如下的式子成立:
3.2 Bellman equation
3.2.1 Bellman equation for
上边这个式子称为 的 Bellman equation, 它揭示了当前 下的 与下一时刻的 的 之间的关系.
3.2.2 Bellman optimality equation for
从定义上我们有:
上式称为 Bellman optimality equation for
3.2.3 Bellman optimality equation for
按定义我们有:
上式称为 Bellman optimality equation for
3.3 Dynamic Programming Based
3.3.1 Policy Evaluation
动态规划的思想就很直观, 直接根据我们之前的 Bellman equation 迭代就行了, 因为 Bellman equation 描述的就是 本身的性质. 更新迭代公式如下:
上述迭代过程称为 iterative policy evaluation. 此外, 也可以使用 Bellman equation for 做迭代, 就是直接对 迭代. 这个称为 Q-policy Iteration.
3.3.2 Policy Improvement
我们的目是找一个 policy, 能够面对不同的 state 采取一个 action. 已知
现在我们让 最大, 这会得到一个相应的 action , 如果我们让另外一个 每次都能让以下式子成立:
这就意味着, 这个 每次都能采取最优的 action. 从而总是有:
于是:
上述过程称为 Policy Improvement. 现在, 如果更新后的 policy 和原始的 policy 一样, 即 , 于是:
可以看到, 这就是 3.2.2 的 Bellman optimality equation for . 换句话说, 此时的 就是最优的 .
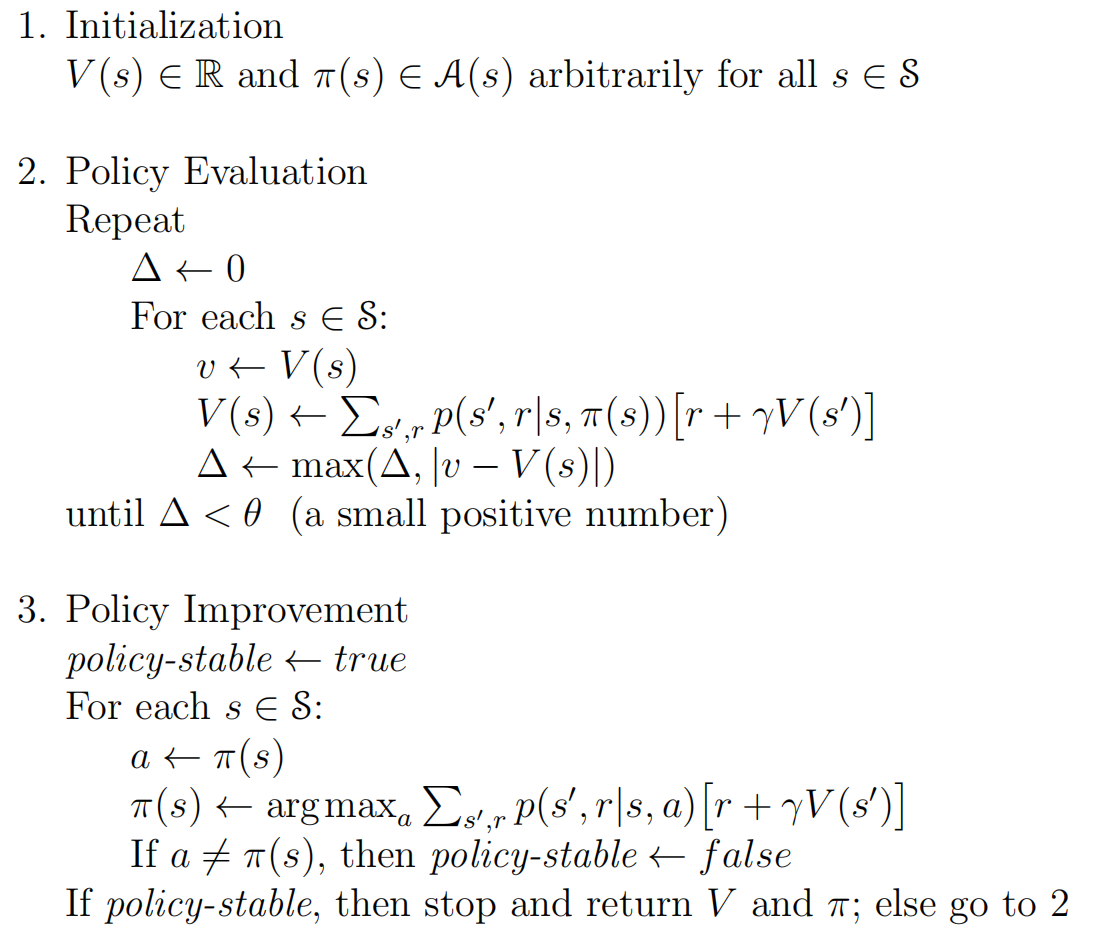
3.3.3 Policy Iteration
 source from refer Reinforcement Learning: An Introduction
source from refer Reinforcement Learning: An Introduction
我们使用 Policy Evaluation 去迭代 , 实现让 预估的更加准确.
然后, 我们使用 Policy Improvement 去找到一个更好的 . 上述过程称为 Policy Iteration.
这个过程 Policy Evaluation 和 Policy Improvement 是交替循环的, 如下:
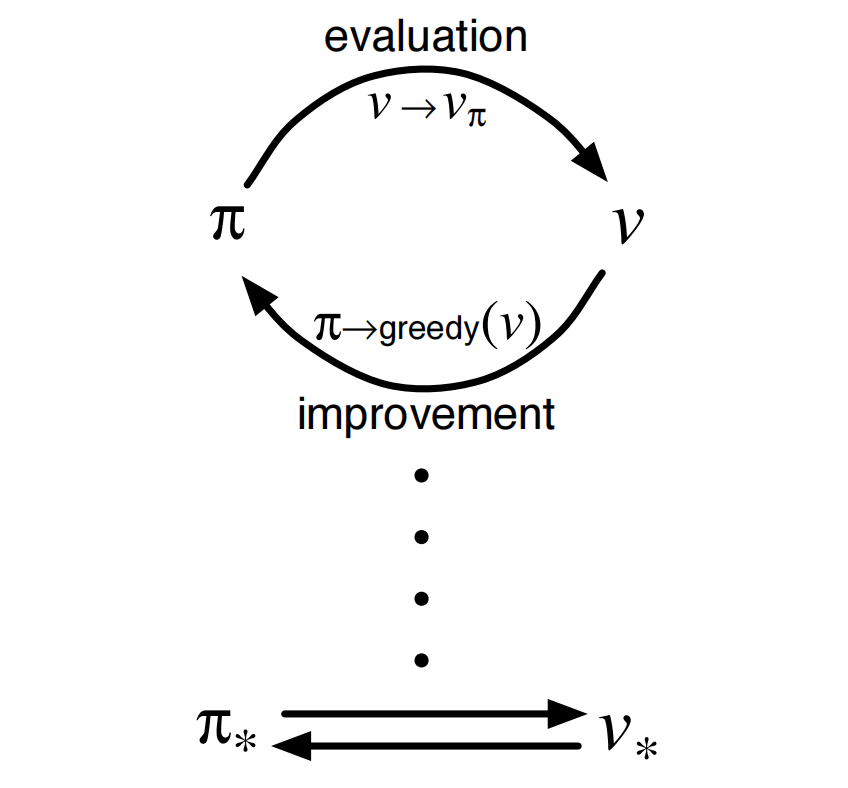 source from refer Reinforcement Learning: An Introduction
source from refer Reinforcement Learning: An Introduction
后续, 多个方法思路都是类似的, 上述循环过程称为 Generalized Policy Iteration.
3.3.4 Value Iteration
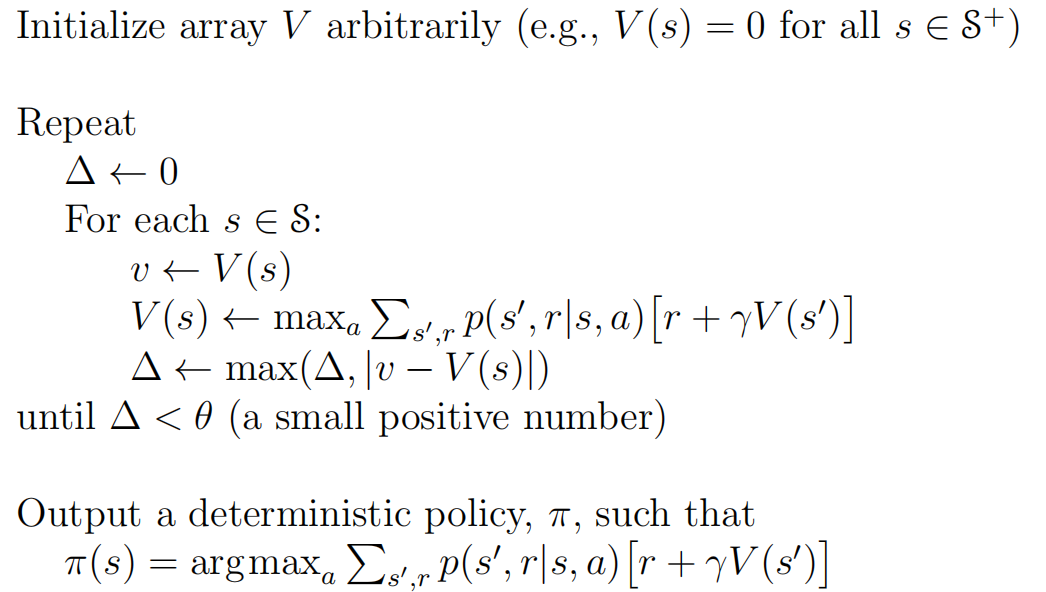
Policy Iteration 有 2 个步骤, 首先要让 V 预估准确, 然后再使用 Policy Improvement, 步骤比较繁琐, Value Iteration 的思想是, 直接从 Bellman optimality equation for 入手 :
上述式子描述的是, 最优的 能够满足的式子, 于是我们直接使用这个式子进行迭代:
当上式迭代收敛后, 得到的一个预估准确的 V function, 并且 的结果就是最优的 对应的 V 值. 算法如下:
 source from refer Reinforcement Learning: An Introduction
source from refer Reinforcement Learning: An Introduction
3.3.5 DP 方法总结
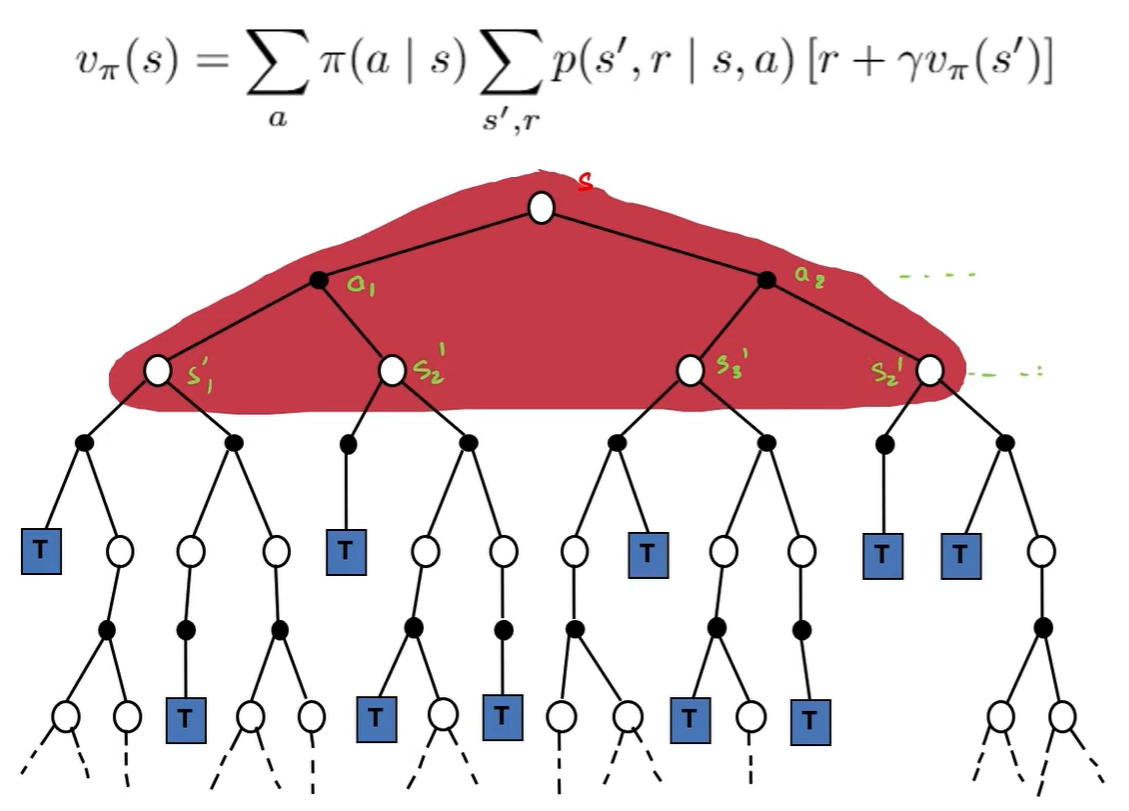
DP 方法总体思路为迭代方法, 主要基于 Bellman equation 进行迭代更新. 它基于当前状态, 观察所有可能的下一步来更新. 如图所示:
 source from refer Monte Carlo Methods
source from refer Monte Carlo Methods
3.4 Monte-Carlo based
3.4.1 state value based
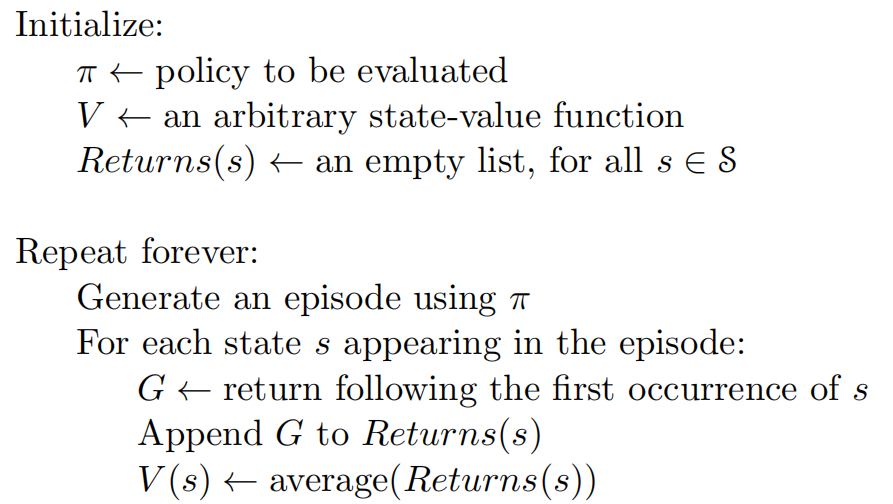
Monte-Carlo 方法就很质朴, 直接基于当前 state, 然后你玩游戏直到结束, 记录分数, 最后求和得到累计奖励 , 然后 minimize 二者的差距:
具体的, 对于某个具体的 state , 收集一批以 s 为起点的 trajectory, 最后计算 reward 的均值作为 :
 source from refer Reinforcement Learning: An Introduction
source from refer Reinforcement Learning: An Introduction
思想如图所示:
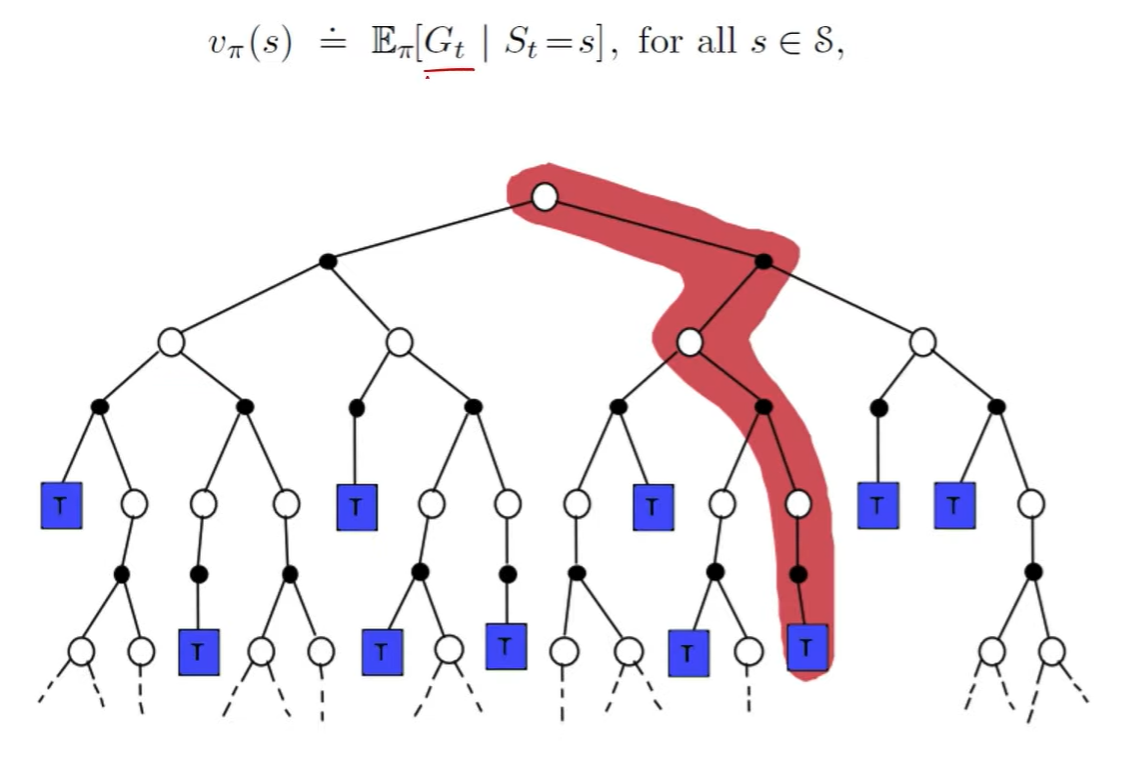 source from refer Monte Carlo Methods
source from refer Monte Carlo Methods
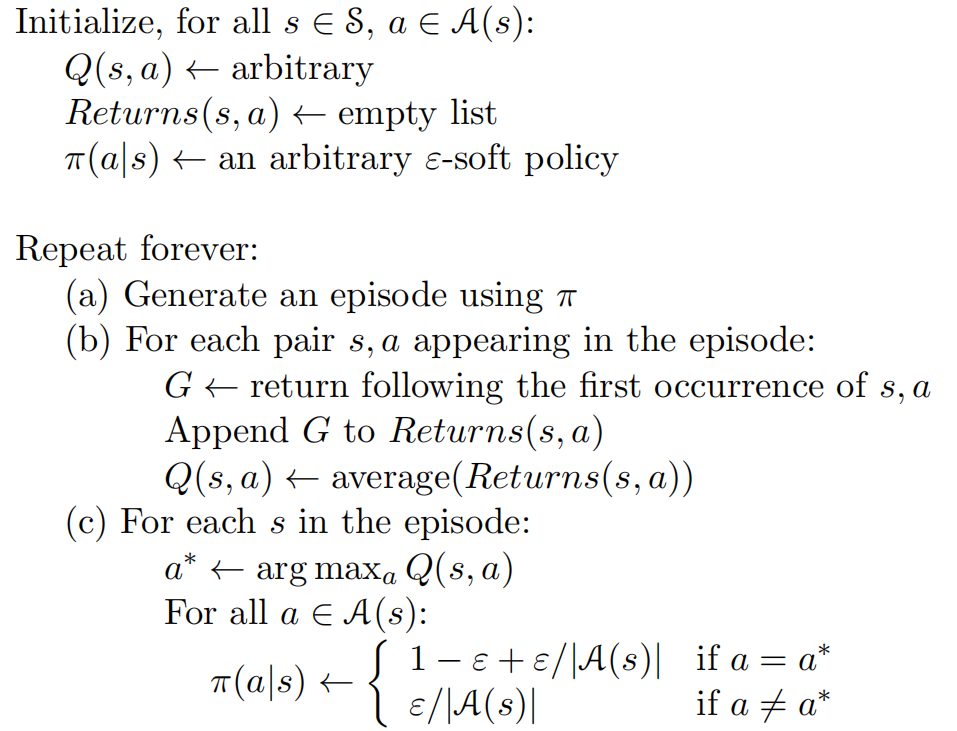
3.4.2 state action value based
但是 state value based 可能比较困难, 因为要预估当前 state 下, 所有 action 的结果. 如果直接预估当前 state 下, 采取一个 action 之后的值可能好一点. 具体的, 收集一批以 state s , action a 为起点的 trajectory , 最后计算 reward 的均值作为 :
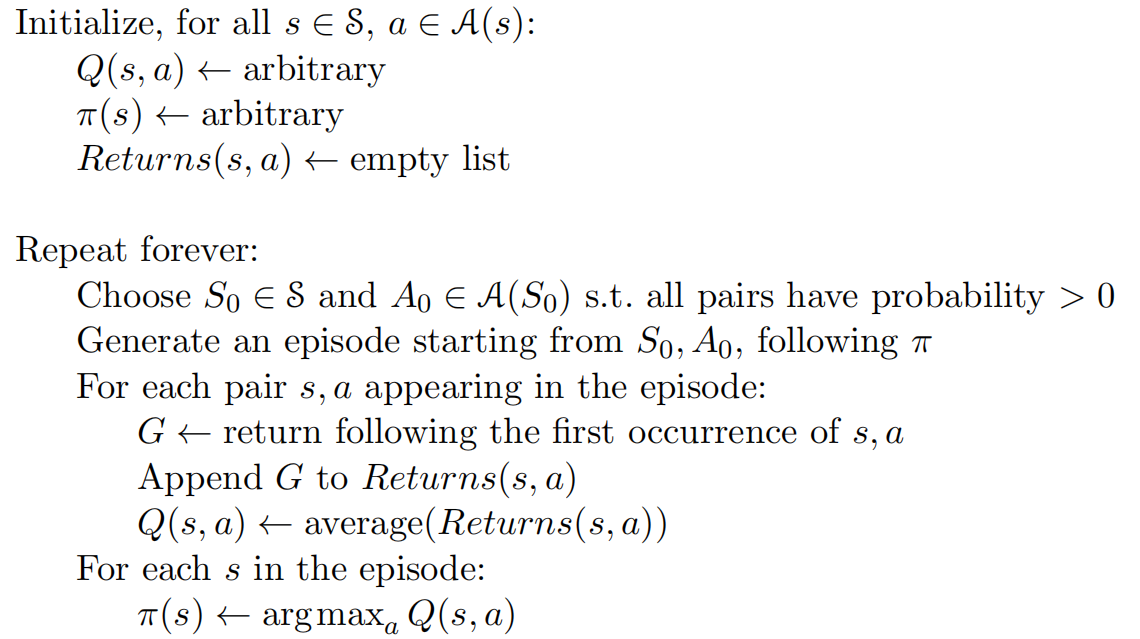 source from refer Reinforcement Learning: An Introduction
source from refer Reinforcement Learning: An Introduction
上述过程也是一个 cycle, 我们使用 Monte-Carlo 方法得到一个预估准确的 Q function, 然后使用这个 Q function 去让 实现 improvement 的操作. 这种取 max 的操作也叫做 , 考虑到 Exploration/Exploitation trade-off , 如果每次都取 max, 会抑制后续的 exploration. 因此引入 , 算法如下:
 source from refer Reinforcement Learning: An Introduction
source from refer Reinforcement Learning: An Introduction
3.5 Temporal-difference based
3.5.1 迭代公式
回顾 的定义: 计算 面对当前 state s 能够获得的奖励, 记 表示基于当前 state 采样的 action 数目.
抽象一下, 可以表示为下边的迭代公式:
告诉我们当前的预估, 是真实看到的结果, 告诉我们应该向实际看到的 reward 方向走, 这很像智能优化中的粒子群算法(关于该算法可以看我的视频讲解).
3.5.2 TD-Prediction
假设我们的 critic 是准确的, 应该有:
易知:
从而:
上式中, 描述的是向后预估一个 state 的 value. 然后再回过头来, 结合当前的预估值看预估的准不准, 也称为 temporal difference error (TD-error).
那如果 不准确, 我们可以使用 来纠正 (因为 至少是确定的).
于是,可以使用如下迭代公式更新 :
前边的 Monte-Carlo based 也可以写作如下式子:
所以 Monte-Carlo based 就是直接用真实的、整个 trajectory 的 reward 与 做比较, 而 Temporal-difference based 则是向后玩一步或者多步, 剩余的使用 进行预估.
当然, 由于现在大家都是 neural network , 因此也可以直接使用梯度下降 minimize 以下差异 DRL Lecture 3: Q-learning:
不过需要注意的是, MC 方法和 TD 方法有时候预估出来的结果可能不一样:
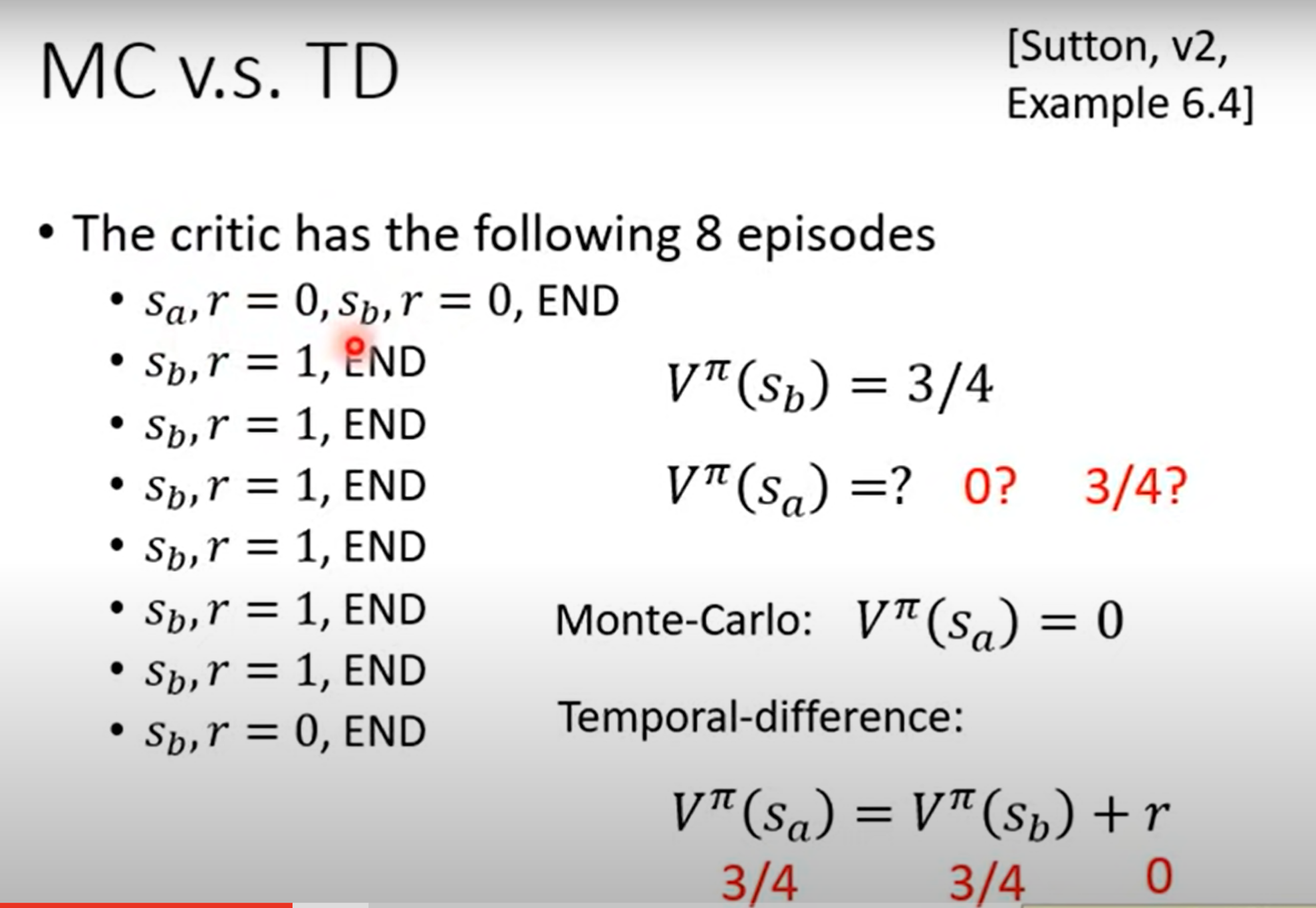 source from refer DRL Lecture 3: Q-learning
source from refer DRL Lecture 3: Q-learning
二者没有说谁对谁错, 只是基于当前的数据, 作出的合理的判断. 不过由于便捷性和效率, 通常使用 TD 方法, 毕竟 MC 方法太磨叽了.
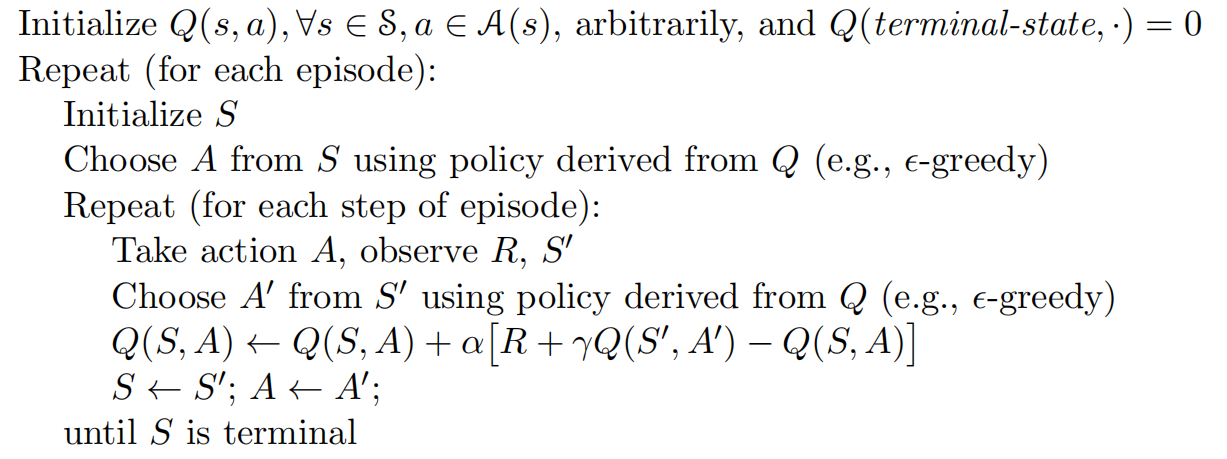
3.5.3 SARSA: ON-POLICY TD CONTROL
我们也可以直接对 进行 TD-Prediction, 该算法也叫 SARSA (State-Action-Reward-State-Action) .
 source from refer Reinforcement Learning: An Introduction
source from refer Reinforcement Learning: An Introduction
这个地方 ON-POLICY 是说我们对下一个 action 的 Q value 预估用的 policy 和获取下一个 action 的 policy 是同一个.
3.5.4 Q-Learning: Off-Policy TD Control
Q Learning 则是直接类似 3.3.4 节的 Value Iteration. 我们可以直接将 improvement 嵌入到更新公式里边, 直接期望 Q function 收敛到最优的 policy 对应的 Q. 算法如下:
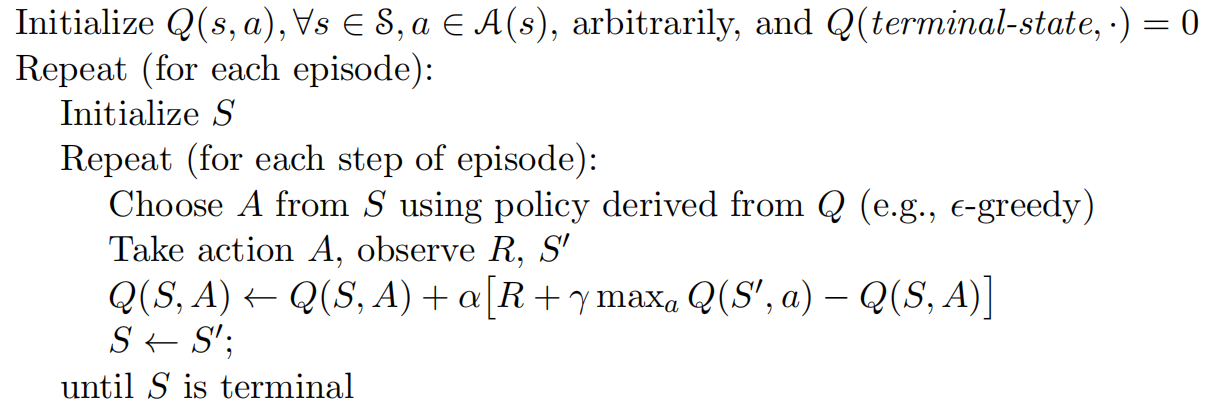 source from refer DRL Lecture 3: Q-learning
source from refer DRL Lecture 3: Q-learning
Q-Learning 也被称为 Off-Policy, 是因为我们计算 的时候用的是 , 而不是 真正想输出的 action.
可以这样理解, 存在一个 , 使得:
于是, 每次对下一个 action 的 Q value 预估的时候, 实际上用的 policy 是 , 而基于当前 state 采取 action 的 policy 是 . 二者不是同一个, 因此叫 Off-Policy.
这个过程就是”培养” , 去尽量向着最优的 给的方向走.
实作上, 由于大家现在都是 neural network 了, 可以直接使用梯度下降去 误差:
算法如下:
[1]. 初始化 Q-function , target Q-function
[2]. 然后对每个 state 都采取 action a, where
[3]. 这样就能收集到一批 4 元对 : {} 到 buffer 里边(buffer 里边的数据要及时更换, 把太早的丢掉, 用更新的 产生的数据放进去.).
[4]. 从 buffer 里边 sample 一笔数据, {}.
[5]. 由于等式左右两边都在变, 考虑到稳定性, 我们用 target Q-function (fixed) 去替换 , 于是优化目标变为:
上边的式子还有一个问题, 就是后边
完全是由 Target Net 来选择高分的 action. Double DQN 发现, Target Net 总是高估自己的 action 的分数, 于是提出用 2 个 net 相互制衡, 实作很简单, 直接 action 输出使用正在更新的 即可, 然后打分还是用 :
换个更常见的写法, 优化目标最终变为:
[7]. if step % C = 0,
这里需要注意的是, 只有一个, 只是 Q function 有 2 个, 其中 的引入只是为了更新的稳定性(如果不考虑稳定性, 那就是原始算法). 但是无论如何, 目标就是要让 逼近潜在的最优的 . (off-policy)
3.5.5 SARSA VS Q-Learning
这里有一个例子, 图中 Cliff 区域的奖励是 -100, 其他区域奖励为 -1. 可以看到 Q-Learning 尽管每次 action 的选取用到了 , 但是我们做 Q 值预测的时候, 总是选择 的, 这就导致最后 Q-Learning 收敛到 optimize policy. 而 SARSA 得到则是相对次优的:
 source from refer Reinforcement Learning: An Introduction
source from refer Reinforcement Learning: An Introduction
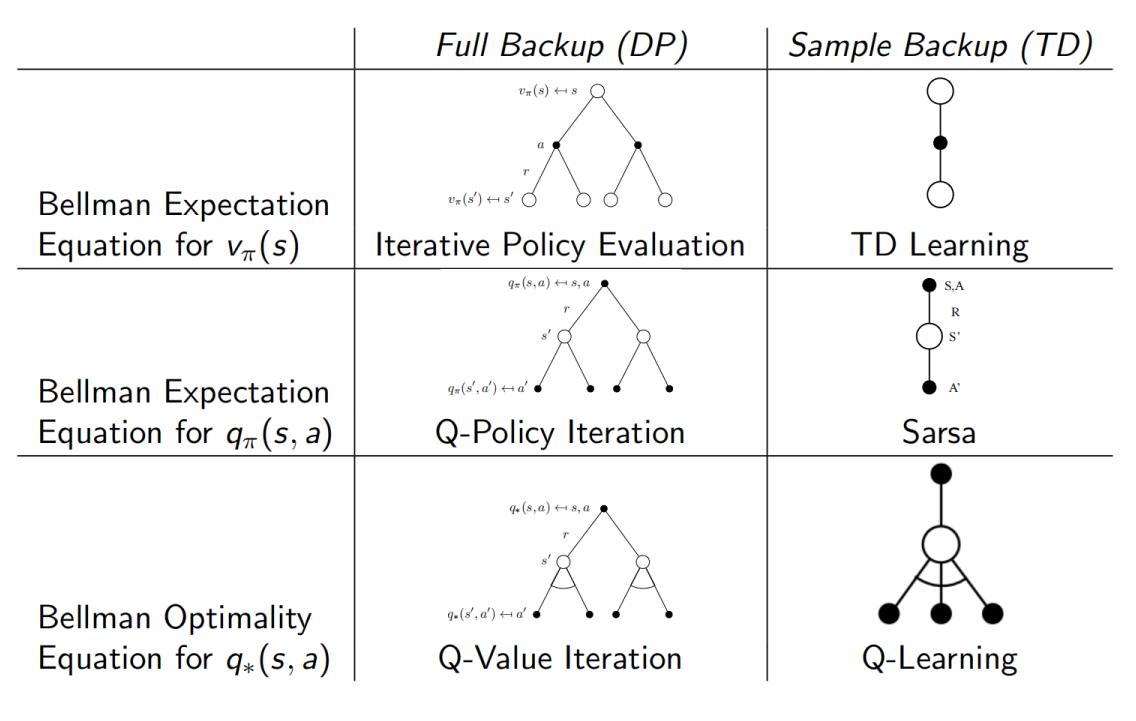
3.5.6 DP VS TD
DP 方法参考 3.3 节. 下边给出 DP 和 TD 方法的区别和联系.

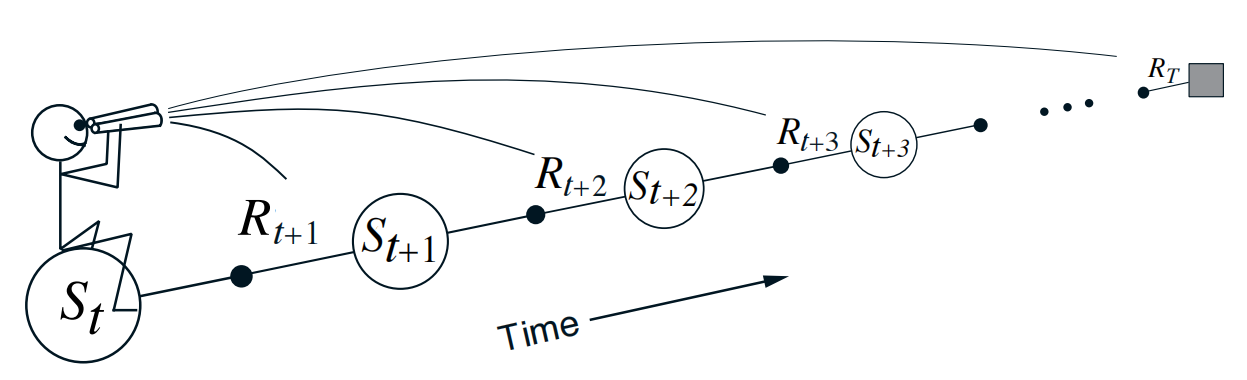
3.5.7 Forward View of TD-
前边我们只是向后观察 1 步:
我们可以向后观察 2 步:
可以向后观察 k 步:
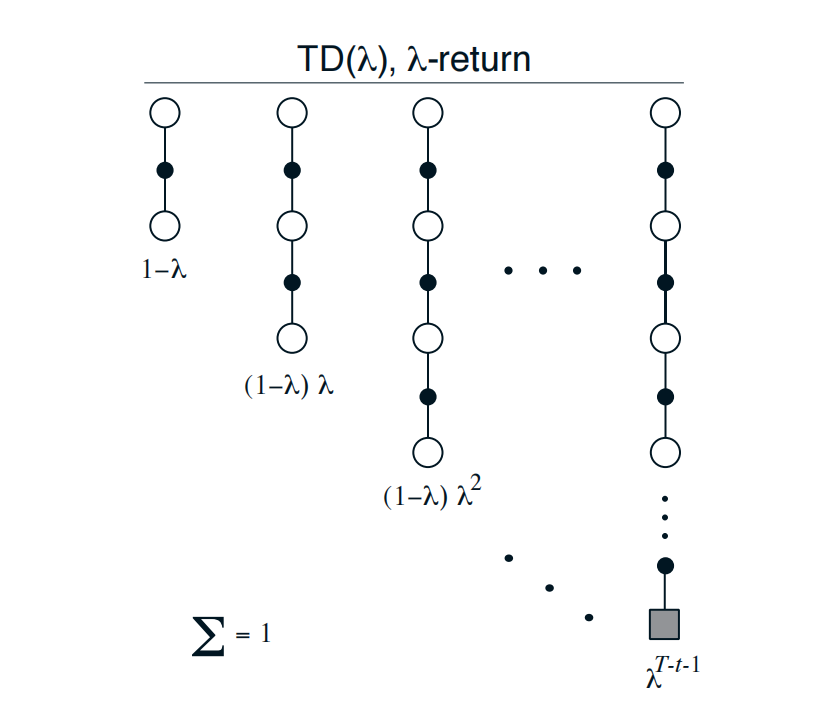
上式全部为 , 我们可以使用加权取平均对所有结果, 记:
加权平均:
其中, 使得权重求和为 1.
 source from refer Reinforcement Learning: An Introduction
source from refer Reinforcement Learning: An Introduction
上述版本称为 Forward View of TD(λ). 原因是我们站在当前 time step 向后观察每个 state 的情况, 越往后的 state, 所分配的更新权重越小(对当前的 state 影响越小):
 source from refer Reinforcement Learning: An Introduction
source from refer Reinforcement Learning: An Introduction
3.5.8 Backward View of TD-
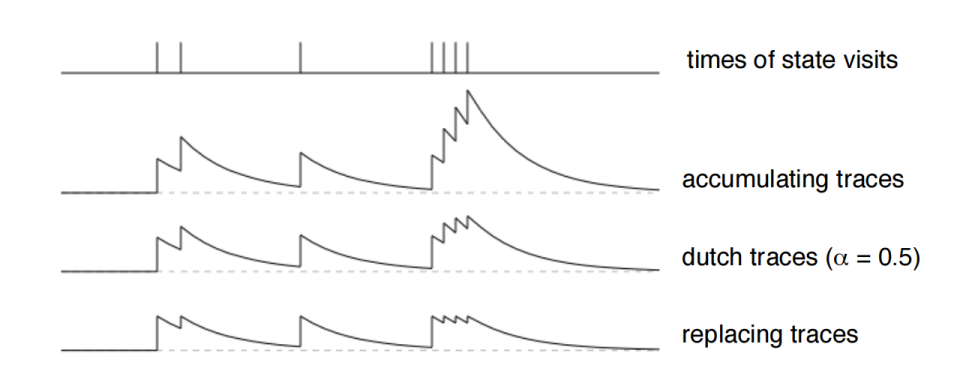
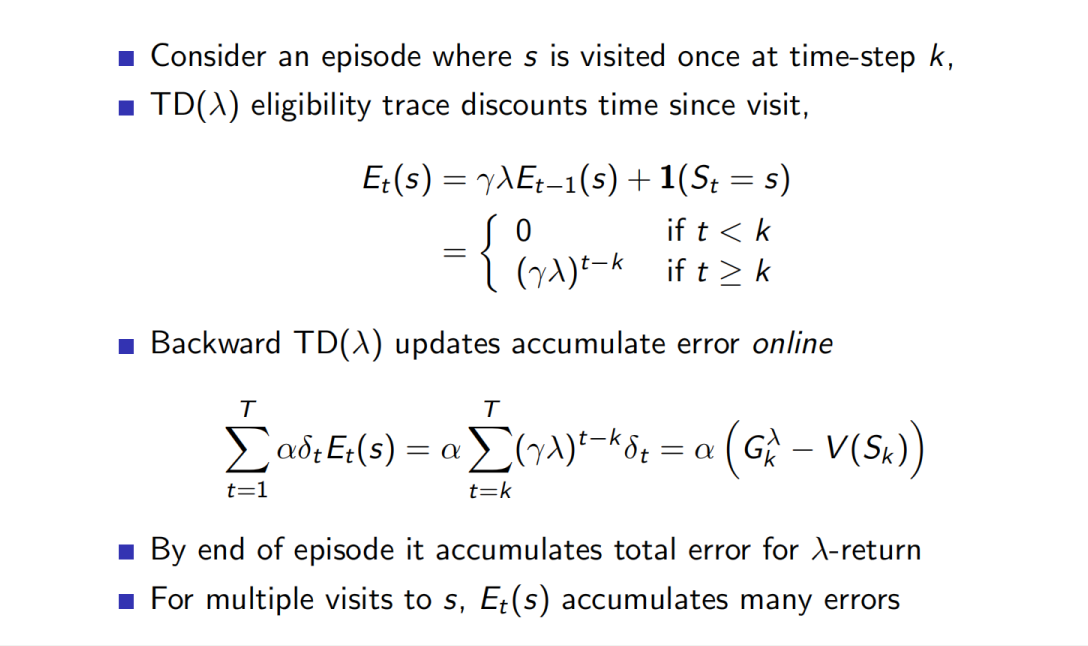
这里需要引入 eligibility trace. 其定义公式如下:
上述公式的逻辑是这样的. 假设有一个特定的 state s. 如果当前这轮更新 Q 的时候, 遇到的 state 就是 s, 那么
否则, 就是当前 state 是其他的 , 那么
如果一个 state s 经常多次出现, 那么属于这个 s 的 就会比较大, 反之就会由于 的存在衰减到 0.
此外 Dutch traces, 当 visit 一个 state 时, 会在之前的基础上先做一个衰减, 然后再加 1. 还有一种是 replacing trace, 当 visit 一个 state 时, 直接会把 traces 置为 1 :
 source from refer Reinforcement Learning: An Introduction
source from refer Reinforcement Learning: An Introduction
算法过程如下:
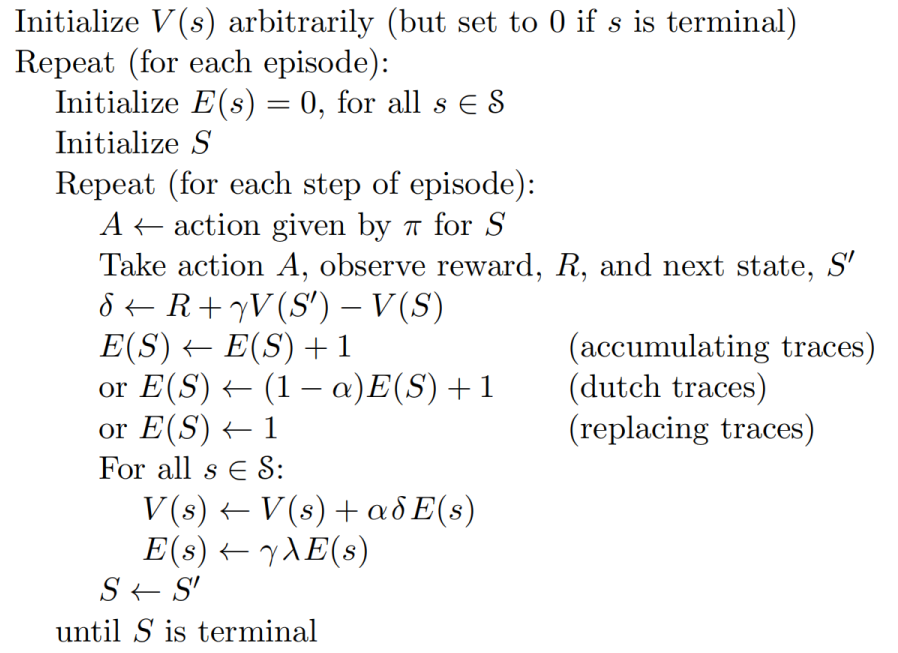 source from refer Reinforcement Learning: An Introduction
source from refer Reinforcement Learning: An Introduction
需要注意的是, 虽然当前遇到的 state 是 S, 内部的 for 循环在更新 的时候, 都使用同一个 对所有的 state 更新.
这个被称为 Backward View of TD-, 是因为我们对每个 sate s 更新的时候, 是基于当前 state S 的 TD-error, 只不过同时还基于 state s 对应的 . 如果 state s 距当前 state S 很远(表现为出现次数很少, 因为我们按时序 visit state), 那么其 就会很小, 最后分配的权重就会很小:
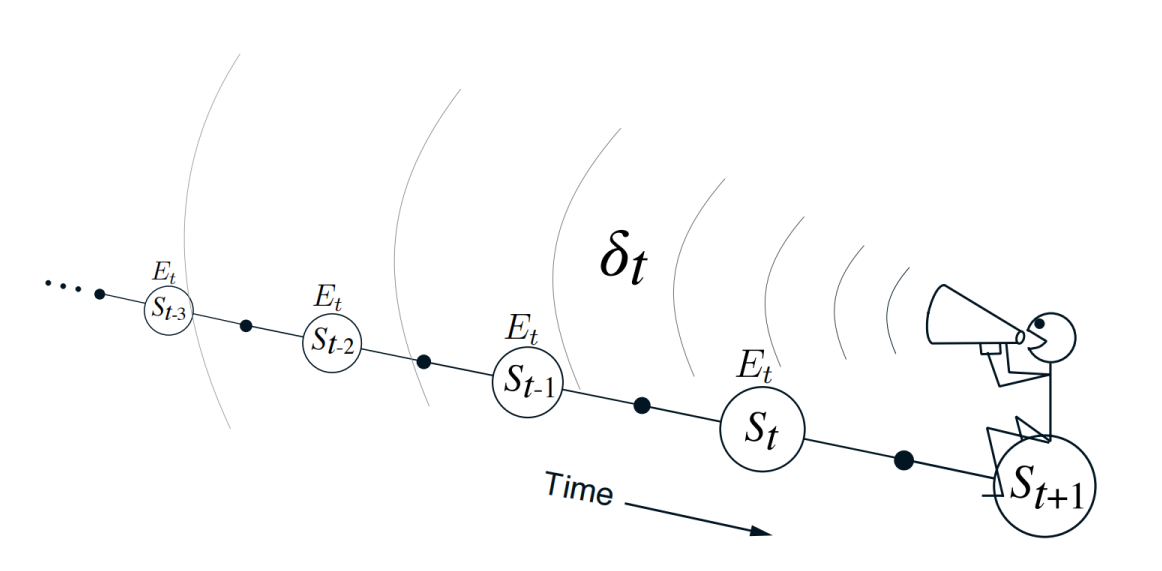 source from refer Reinforcement Learning: An Introduction
source from refer Reinforcement Learning: An Introduction
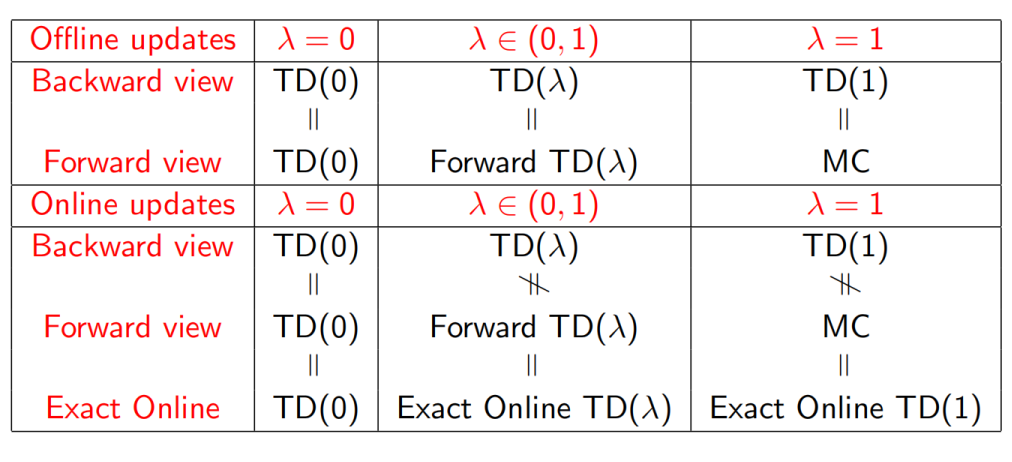
3.5.9 Equivalences of TD-
forward view : 这个按定义的计算方式, 易知此时就是 TD(0).
backward view : 当 时, 只有当前 state S 对应的 , 其他的永远恒为 0. 此时就是 TD(0).
对于 Online(实时更新) 和 Offline(重复收集多个 episode 的数据, 最后进行 batch update) 的学习方式, 由于 时, TD(0) 的 reward 计算方式 : , 此时的 TD-error 就只关注相邻的 2 个 state, 因此最终结果是一样的.
forward view 如下:
backward view 如下:
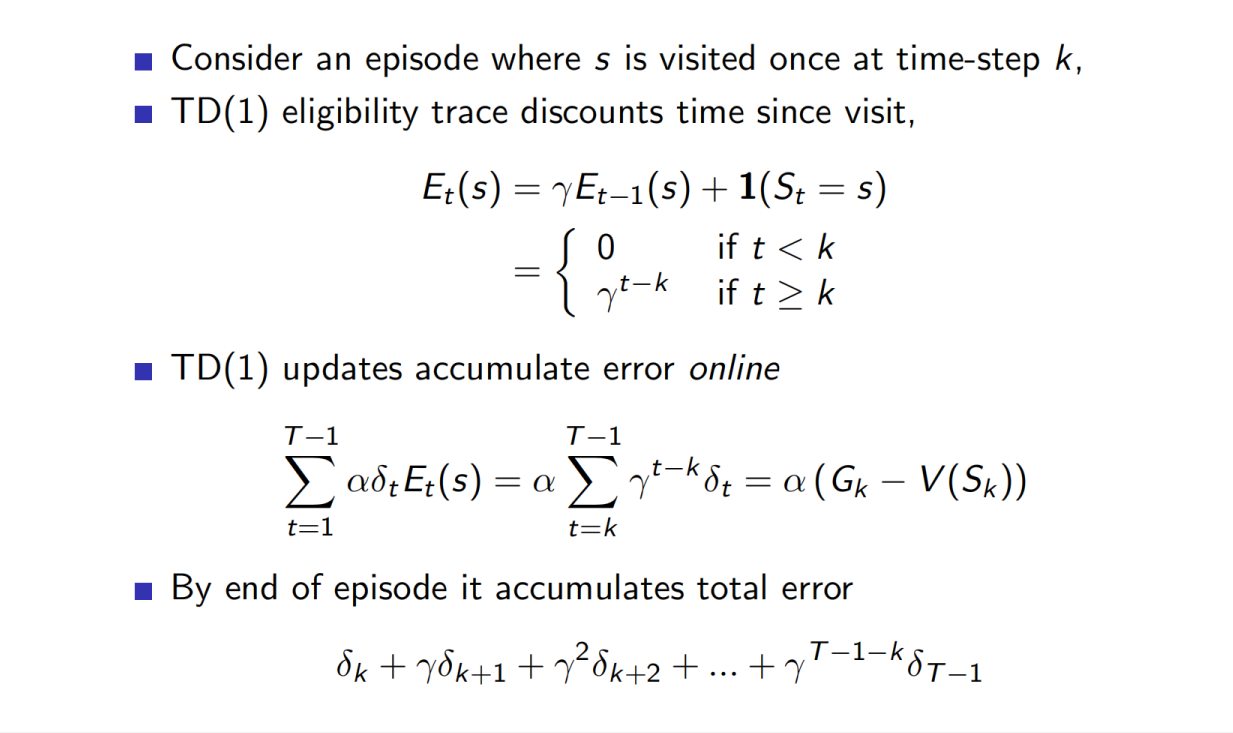
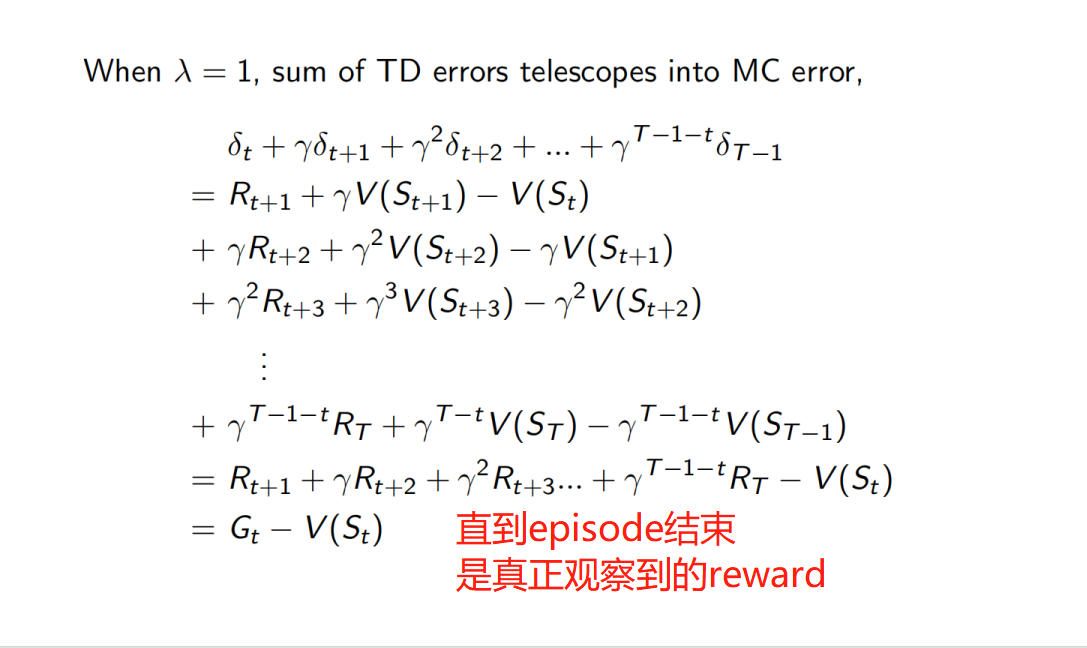
可以看到, 如果看直到 episode 结束的累计错误, 最后再进行 batch update, backward view 的 TD(1) 就是 MC error. 因此, 时, forward view 和 backward view 是等价的, 均为 MC 方法.
但是, 当进行 Online 更新时, forward view 的 TD(1) 仍然是 MC 方法. 但是 backward view 的 TD(1) 不是了.
- general
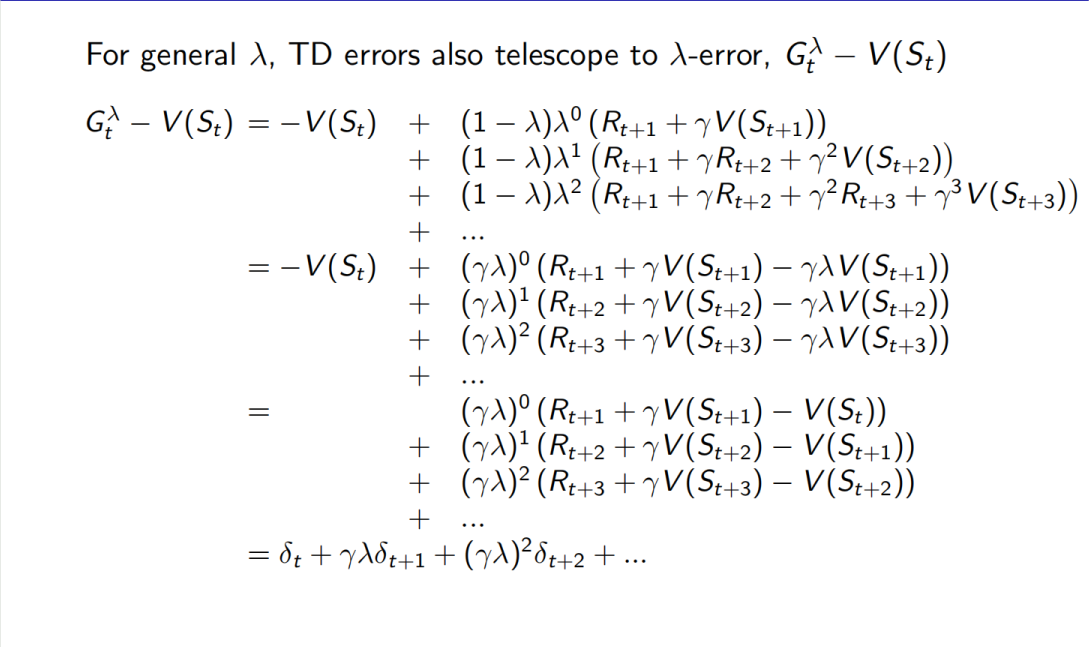
当 结论同理. 同时上述推导过程还显式的证明了在 Offline 的更新方式下, forward view 和 back view 是等价的. 最终给出以下表格:
另外 backward view 和 forward view 的等价证明也可以参考:http://www.incompleteideas.net/book/ebook/node76.html